そのテクノロジーをもっと身近に
プロジェクト概要
PatRobotとは?
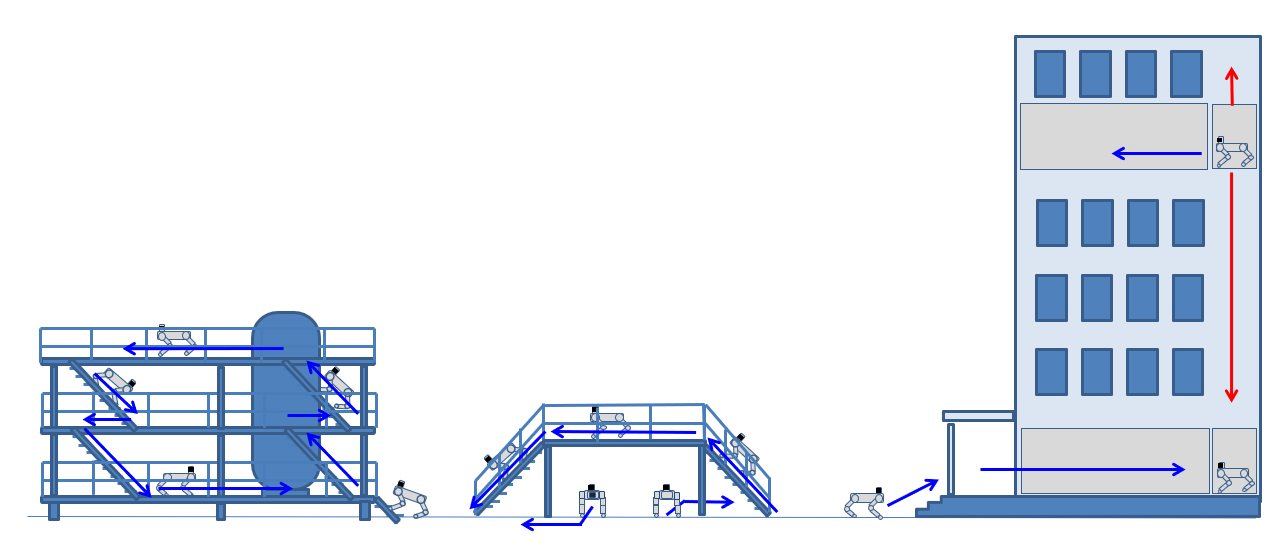
3D Field Navigator 「PatRobot」は、階段や立体交差、複数のフロアを含む複合的な立体経路を4足歩行ロボットや車両型の移動ロボットで自律走行するための3Dの自律走行制御ユニットです。
なにができるの?
巡回業務、点検業務、警備などを人に代わって行うことができます。今までのAGVよりもより広く長く、かつ立体的な構造物にも対応できます。
なにがすごいの?
TechShare独自開発の3D自己位置推定・ナビゲーションシステム3D HALNA Engineを搭載しているので、通常フラットフロアはもとより、階段、段差、スロープなども自由自在に自動で動き回れます。
どこで使えるの?
主に国を支える重要インフラ施設や、ビルなどで活躍できます。ソフトウェアは日本製で、通信もVPNを通しているので安心して使うことができます。
プロジェクト紹介動画
機能紹介
3次元立体移動
自律走行機能の特徴
-
フラットフロアでの自律走行機能
-
階段や立体交差を含む3次元な経路の自律走行ナビゲーション機能
-
エレベータや車両運搬等による別空間移動後の自律走行対応
ロボットは頑張って階段を上りますが、それでもロボット本体のスペックを超えた階段は登れません。
障害物検知
障害物検知による動的な経路生成と停止
-
経路ごとに回避・停止が可能
-
経路によっては障害物を無視し、経路に忠実に走行することも可能
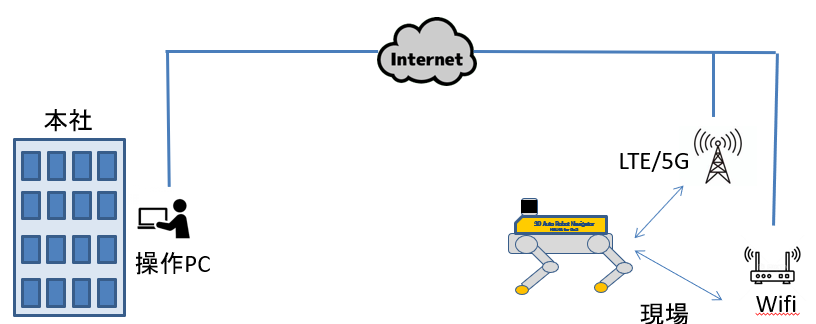
遠隔操作
遠隔地からの操作・コマンドの送信
-
WebRTCを用いた低遅延のコマンドの送信
-
VPNでラッピングしたセキュアな通信
ルート設定
経路設定・安全停止設定
-
GUIによるさまざまな経路設定方法が利用可能。
-
正確な位置決め指定型・バイパス型・経路記憶型
-
障害物回避経路・停止経路・階段昇降経路
-
特殊アクションポイントの設定(充電・写真撮影・PTZ撮影)
PTZでの撮影

定点でのPTZ
-
巡回中にチェックしたい場所をPTZで撮影可能
以下の3モデルから選択可能
ZR10(最大30倍ズーム)
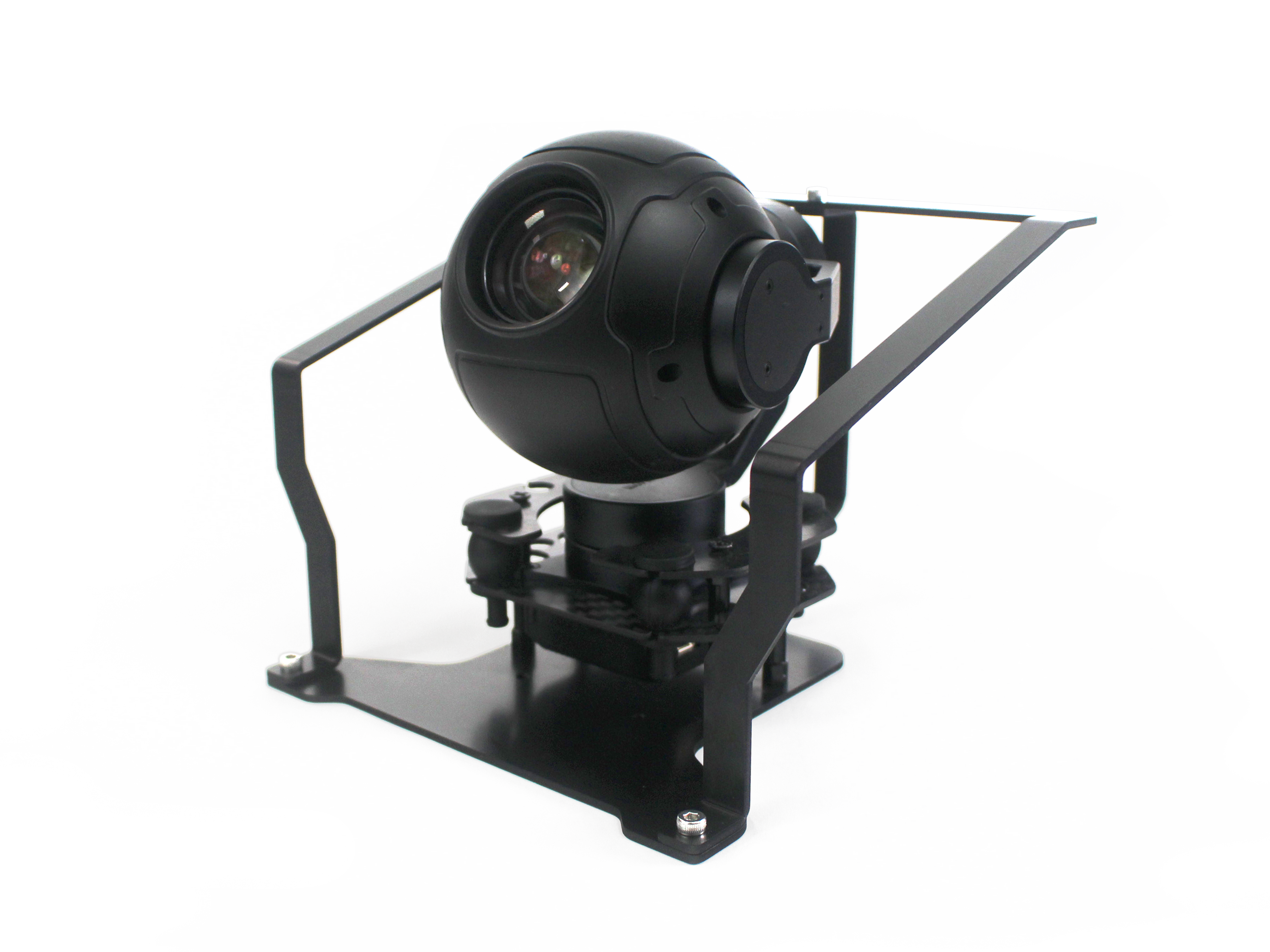
ZR30(最大180倍ズーム)

ZT6(温度検知機能搭載)

定期巡回機能
スケジューラー機能搭載
-
巡回する経路を時間ごとに設定可能

直感的なGUI
GUIからの操作が簡単
-
自律走行の開始や遠隔操作などを一つの画面で完結
-
複数のロボットを一つのデバイスから操作可能
実証実験の流れ
コンサルティング
↓
現場視察
↓
実証実験開始
↓
試験運用開始
働ける場所
化学プラント
工場
製鉄所
建設
浄水場
変電所
働けるロボット
B2
(Unitree Robotics)
Go2
(Unitree Robotics)
環境について
現在環境によってはロボットの自律走行がうまくいかない場所があります。
以下の環境に該当する場合は自律走行の精度が低い、もしくは遠隔での制御が難しくなる場合があります。
以下の環境に該当する場合は自律走行の精度が低い、もしくは遠隔での制御が難しくなる場合があります。
非推奨環境
-
狭い場所
特徴量が取りずらい狭いところを苦手としており、自分の位置を見失うことがあります。 -
特徴点がない広い場所
反対に、だだっ広い原っぱなど、目標になる物体がない広い空間も苦手です。 -
急傾斜の階段がある経路
ロボットは頑張って階段を上りますが、それでもロボット本体のスペックを超えた階段は登れません。 -
広範囲で障害物が多く変動する環境
人が多く通る場所や物の移動が頻繁な環境や、頻繁に風景が変わる場所はSLAMのトラッキングとマッピングの安定性を損ないやすいです。
特に移動する物体が多いと、センサーが誤検出することが増え、精度が低下します。 -
通信環境が弱い場所
自己位置推定には影響はありませんが、遠隔操作などがうまく効かなくなる場合があります。 -
その他ロボットが動くには適していない場所
その他にも相性によってはロボットのセンサーがうまく動作しない、またはアルゴリズムに適していない場所もあります。
今後色々な場所に適応していきますが、今はまだ限定的な場所のみであることをご理解ください。
導入事例
大成建設株式会社 四足歩行ロボットの遠隔操作・自律制御による巡回監視システム「T-InspectionX」 を開発
月島JFEアクアソリューション株式会社